")
")
")
")
")
")
")
")




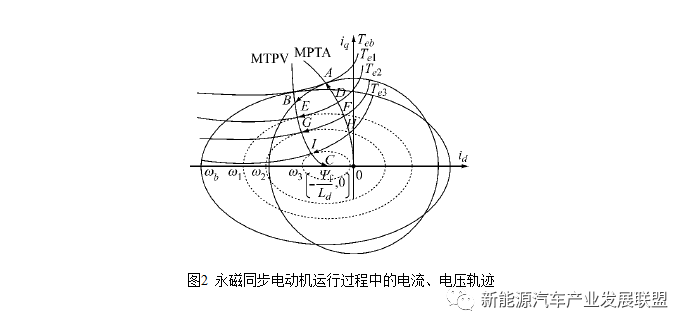
1) 弱磁区域I。定义电磁转矩与产生其所需的电流的比为转矩电流比。基频以下电动机恒转矩运行,采用线性最大转矩电流比控制,如图中OA所示; 最大转矩电流比曲线和最大转矩电压比曲线之间的区域称为弱磁区域I。
2) 弱磁区域 II。在基频以上,电动机沿着 MT-PV 曲线运行,称为弱磁区域 II。
3. 系统结构框图
图3为永磁同步电动机调速系统结构框图。虚线部分为电流修正值计算模块。速度指令信号与检测到的转子速度信号相比较,经速度控制器的调节,输出电磁转矩Te指令信号,


4. 基于梯度下降法的内埋式永磁同步电机弱磁控制策略
内埋式永磁同步电机(IPMSM)由于结构上的特点使其在性能上有很多突出的优点,如高功率密度、高功率因数、结构紧凑、调速范围宽等,正是由于这些优点使其广泛应用于家用电器、交通运输、磁盘驱动器以及机床、机器人等数控系统。轨道交通和电力牵引传动系统要求电机在速度较低的时候能够输出比较大的转矩,这样可以满足起动、加速、低速爬坡等要求,除了对基速以下的一些要求外,还要求在速度范围上能够更加宽广,这就对电机的弱磁性能提出了要求,要求其调速的范围大。内埋式永磁同步电机由于存在结构转矩,比较容易弱磁,且输出转矩大,因此对内埋式永磁同步电机的研究具有重要的意义[10]。
基于梯度下降法的弱磁控制算法,不需要查表,控制精度高,响应速度快,且鲁棒性好。具体算法描述如下。
内埋式永磁同步电机运行过程中电流、电压轨迹曲线如图4所示。基速以下,电机运行在恒转矩区域,采用线性最大转矩电流比(MTPA)控制可以使永磁同步电机获得最大的电磁转矩[11],如图中OA曲线所示。随着转速的升高,电机将沿着最大转矩电流比曲线OA和最大转矩电压比(MTPV)曲线BC之间的恒转矩曲线运行,即为弱磁区域I(FWRl)。在更高的转速范围,电机沿着MTPV曲线BC运行,即上述弱磁区域2(FWR2),如图2所示。对于给定参考转矩瓦,随着转速的升高,电机沿着恒转矩曲线DE运行,到达E点之后,如果转速继续升高,电机将沿着MTPV曲线EC运行,其输出转矩逐渐减小M。在弱磁过程中,最主要的是确定设定电流修正值的大小。首先根据电机的运行曲线确定其所在的弱磁区域(FWRl、FWR2),再根据所在的弱磁区域,对电流设定值进行相应的修正。
(二)采用改进的超前角控制弱磁增速
超前角弱磁控制算法是目前较为常用的弱磁控制方法[12]。运用该算法控制表贴式永磁同步电机运行于弱磁区时,随着负载的增加,通常会出现如下问题: 从恒转矩区到恒功率区的过渡过程中,出现较大的电流震荡,从而引起速度波动,系统的动态性能变差。而在恒功率区,会出现稳态速度下降的现象,稳态时的速度和电流波动也会变大,系统的稳态性能不佳。
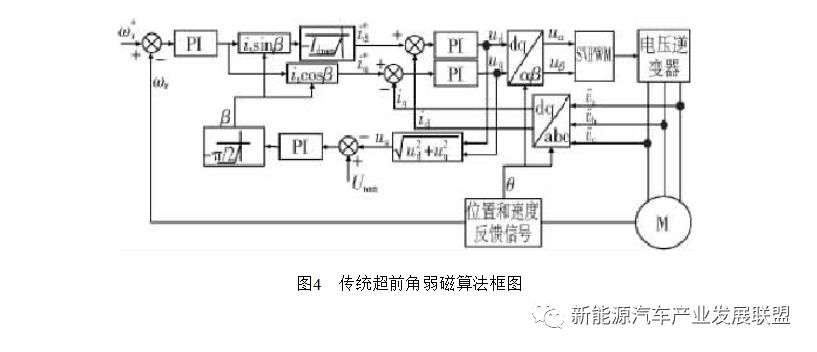
1. 表贴式永磁同步电机数学模型及传统超前角弱磁控制算法
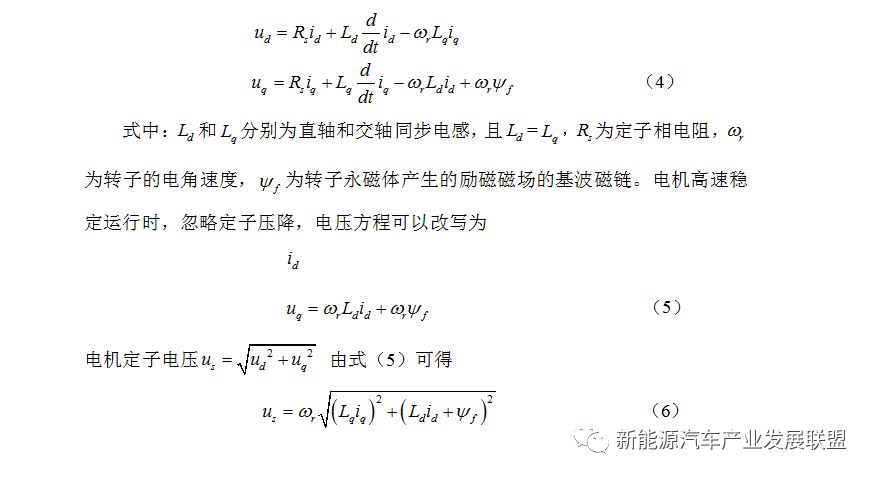
d-q轴系下表贴式永磁同步电机定子电压方程为[13]
2.改进的 SVPWM 过调制算法
表贴式永磁同步电机采用传统超前角弱磁控制算法加载运行时,当给定电机转速超过其转折速度,在其升速阶段,会出现 d,q 轴电流的剧烈震荡,进而导致速度的波动,电机没有实现从恒转矩区到恒功率区的平滑过渡。电流的剧烈震荡通常会引起驱动器的过流保护,同时引发逆变电路较大的di / dt 和 dv / dt,增大电机运行时的电磁干扰,降低功率器件的使用寿命。通过分析得出在弱磁调速的升速阶段,电流环的输出即电压指令值在某些瞬会超过 SVPWM 算法的输出范围,由于 PI 调节器固有的延迟性,依靠弱磁控制的电压闭环并不能快速地将电压调整过来,从而造成了输出电压在某些瞬间不可控,引起了电流的震荡。为此,本文尝试采用一种改进的 SVPWM 过调制算法,在逆变器直流侧电压不变的情况下增大其交流电压输出,提高电压输出能力,改善弱磁调速时的动态性能[15]。
(三)内置式永磁同步电动机弱磁控制
内置式永磁电机的永磁体埋在转子铁心里面,在弱磁运行时使其具有退磁的防护作用,所以内置式永磁电机比表贴式永磁电机不易退磁。由于内置式永磁电机d轴电感大于表贴式永磁机,且d轴电感小于q轴电感,具有磁阻转矩,所以其具有更宽的恒功率范围和优良的弱磁扩速能力[16][17],非常适用于启动、低速或爬坡时输出大转矩,在高速时输出大功率,以及宽调速范围、高可靠性的车辆环境中。与传统电励磁电机相比,内置式永磁同步电动机具有体积小、质量轻、损耗小、效率高、结构简单、运行可靠等显著优点,在高性能、转矩响应快速性的场合具有很好的应用前景,所以在电动汽车中采用永磁同步电动机驱动成为发展趋势[18]。
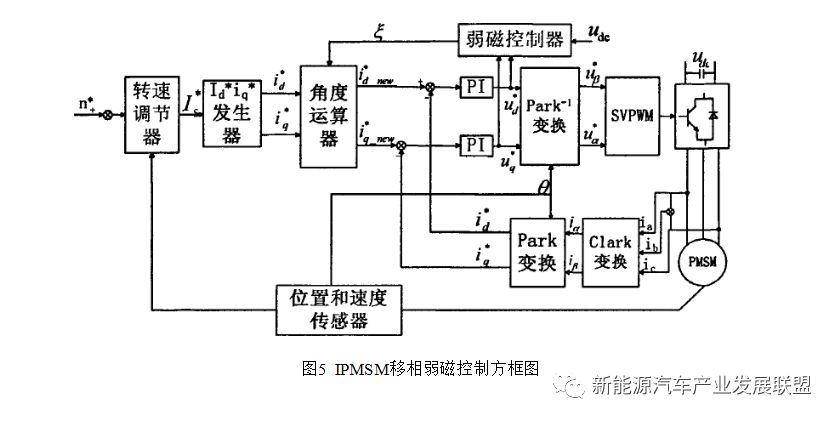
1. 内置式永磁同步电机移相弱磁控制策略
图5是本设计提出的弱磁控制策略方框图。
2. 具有快速动态响应的前馈弱磁控制策略

(收集整理:电工培训学校)

")
